Le LIRIS au salon Innorobo
Le LIRIS a participé au salon INNOROBO, salon professionnel international de la robotique de services, qui s'est tenu du 19 au 21 Mars 2013 au Centre de congrès à Lyon
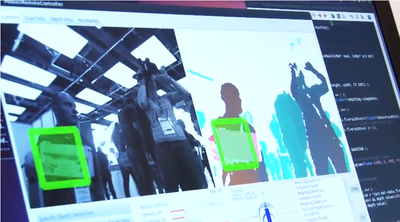
- L'équipe Imagine a montré un robot de type "Eddie" de la plateforme robotique VOIR. Le robot est capable de détecter des objets préalablement appris et de reconnaitre la pose d'un humain placé devant la caméra.
- Une autre contribution affichée concerne une collaboration avec l'équipe SILEX. A l'aide d'un mécanisme basé sur la motivation intrinsèque, le robot découvre, de manière automatique, un comportement lui permettant d'éviter des obstacles et d'approcher d'un objet ciblé.
- Un des axes de recherche de l'équipe Imagine du LIRIS concerne l' "informatique affective", et en particulier l'élaboration de modèles permettant la reconnaissance de l'émotion à partir de visages (expressions faciales), du signal audio de parole, mais également l'émotion induite par la vision d'images, de vidéos et l'écoute de musique. Récemment, un portage et une adaptation de ces méthodes sur une plateforme robotique a été envisagée, et en particulier sur le robot humanoïde Nao de la société Aldebaran. L'objectif est alors de doter Nao de la capacité de reconnaître l'émotion induite par son environnement (émotion de son interlocuteur exprimée par le visage et/ou la voix, ambiance de la scène (musique, couleur, luminosité, …)) et de réagir en conséquence.
- Les équipes DRIM et SOC ont fait un retour d'expérience sur l'utilisation de ROS (Robot Operating System) dans une architecture pour le web des objets (WoT) dans le cadre du Workshop ROS organisé par Imaginove.
- Geomod participe au projet FUI Robot Populi, en partenariat avec Awabot, Artefact Studio, POB Technology et Gostai. L'objectif est de créer des outils permettant de rendre la robotique accessible au grand public.