


Dans ce chapitre, nous nous intéressons aux particularités des cartes combinatoires lorsqu’elles sont utilisées pour représenter des images. En effet, de par la structure régulière des grilles considérées, la topologie des partitions représentées possède des propriétés particulières.
La problématique sous-jacente est la représentation et la manipulation de régions dans une image étiquetée. En effet, la plupart des algorithmes de segmentation ont besoin de représenter le résultat de la segmentation dans une structure de données afin de pouvoir manipuler les régions obtenues, par exemple pour calculer des caractéristiques sur ces régions. Ces caractéristiques peuvent être colorimétriques (par exemple la moyenne des niveaux de gris de la région), géométriques (par exemple une estimation de la forme de la région) ou topologiques (par exemple retrouver toutes les régions adjacentes à une région).
Plusieurs travaux portant sur la définition d’une telle structure de données ont conclu qu’il était intéressant de représenter les subdivisions des régions en cellules, et de décrire les relations d’incidence et d’adjacence entre ces cellules, pour pouvoir ensuite utiliser ces informations au sein d’algorithmes de traitement d’images. C’est dans ce cadre que des recherches ont débuté à la fin des années 1980 sur l’utilisation des cartes combinatoires pour représenter des images 2D [BG88]. Ces travaux se sont ensuite développés dans les années 1990 [Fio96, BD99] notamment durant les trois thèses de Jean-Philippe Domenger [Dom92], Christophe Fiorio [Fio95] et Luc Brun [Bru96]. Les cartes combinatoires 2D ont été aussi utilisées dans des problématiques d’édition d’images [BG89, GHPVT89, BG91] et de segmentation d’images [BDB97, BD97, BB98, AFG99, Köt02, BDM03].
Mais il n’existait pas, lorsque j’ai débuté ma thèse, de travaux en dimension supérieure, et j’ai donc travaillé à la définition d’un modèle combinatoire de représentation d’une image 3D étiquetée et à son utilisation au sein d’opérations de traitement d’images. Pour atteindre cet objectif, j’ai commencé par étudier le problème en 2D car l’extension des modèles existants était délicate. C’est ce travail qui m’a amené à la définition des cartes topologiques en 2D et 3D puis à l’étude d’opérations sur ce modèle.
La principale difficulté, que nous allons retrouver tout au long de ce chapitre, est la propriété de minimalité des cartes manipulées (en nombre de cellules). Cette propriété supplémentaire est liée aux informations sur les régions que nous souhaitons décrire. Intuitivement, lorsque deux régions sont adjacentes, elles se touchent par une zone de contact qui doit être représentée par une seule cellule dans la carte. Cette notion de zone de contact est formalisée dans ce chapitre par la notion d’arête frontière en 2D et de face frontière en 3D. Une seconde difficulté concerne les problèmes de déconnexion susceptibles de se poser durant les simplifications. Ces problèmes doivent être résolus pour garantir l’absence de perte d’information durant les simplifications. Ce sont ces deux problèmes, qui sont d’ailleurs liés, qui rendent difficile la définition des cartes topologiques et qui étaient bloquants dans l’extension des modèles existants en 3D. Dans les deux cas, l’utilisation et le contrôle des opérations de suppression nous à permis de résoudre les problèmes.
Le plan de ce chapitre est le suivant. Tout d’abord nous commençons par présenter Section 4.1 les notions préliminaires liées à la géométrie et topologie discrètes, et nécessaires par la suite. Puis nous présentons Section 4.2 les modèles qui existaient avant que nous démarrions nos travaux. Enfin nous présentons la définition de notre modèle, la carte topologique, tout d’abord en 2D Section 4.3 puis en 3D Section 4.4. Nous présentons à la Section 4.5 les opérations d’extraction, de fusion et de découpe définies sur les cartes topologiques, avant de conclure Section 4.6 et de donner des perspectives de recherche à ce chapitre.
Nous présentons dans cette section les notions de base utiles dans la suite de ce chapitre. Un pixel (resp. voxel) est un point du plan discret ℤ2 (resp. de l’espace discret ℤ3) avec une valeur qui peut être une couleur ou un niveau de gris, et une image de dimension 2 (resp. dimension 3) est un ensemble fini de pixels (resp. voxels). Une image étiquetée est une image dans laquelle chaque pixel (resp. voxel) est étiqueté. Il n’y a pas de contrainte sur cet étiquetage, et il est facile d’associer à n’importe quelle image une image étiquetée simplement en prenant comme étiquette la valeur associée à chaque pixel (resp. voxel).
La distance l1 entre deux points p=(p1,…,pn) et q=(q1,…,qn) d’un espace euclidien est l1(p,q)=∑i=1n|pi−qi|. La distance l∞ est l∞(p,q)=maxi=1n|pi−qi|.
Deux pixels sont 4-adjacents si la distance l1 entre les deux pixels égale à un, ils sont 8-adjacents si la distance l∞ est égale à un. Deux voxels sont 6-adjacents si la distance l1 entre les deux voxels est égale à un, 26-adjacents si la distance l∞ est égale à un, et 18-adjacents s’ils sont 26-adjacents et si la distance l1 est inférieure ou égale à deux. Soit un pixel (resp. voxel) p, son α-voisinage est l’ensemble des pixels (resp. voxels) α-adjacents à p. Nous utilisons l’ordre lexicographique1 pour comparer deux pixels (resp. voxels).
Un α-chemin de pixels (resp. voxels) est une suite de pixels (resp. voxels) deux à deux α-adjacents. Une α-courbe est un α-chemin tel que chaque pixel (resp. voxel) de la courbe, sauf ses deux extrémités, a exactement deux points α-adjacents dans la courbe, les deux extrémités de la courbe ayant exactement un point α-adjacent dans la courbe. Une α-courbe est fermée si c’est un α-chemin tel que chaque pixel (resp. voxel) de la courbe a exactement deux points α-adjacents dans la courbe.
Soit E un ensemble de pixels (resp. voxels). Le complémentaire de E, noté E, est l’ensemble des pixels (resp. voxels) de ℤ2 (resp. ℤ3) n’appartenant pas à E. E est un ensemble α-connexe s’il existe un α-chemin entre chaque couple de pixels (resp. voxels) ayant tous ses éléments dans E.
Dans ce travail, nous choisissons de manipuler les ensembles de pixels 4-connexes (resp. voxels 6-connexes). Cela nous amène à la définition centrale de la notion de région.
Pour éviter un traitement particulier des pixels (resp. voxels) du bord de l’image, nous considérons que l’image est imbriquée dans une région infinie R0 contenant l’ensemble des pixels (resp. voxels) du complémentaire de l’image. Par définition, l’ensemble des régions est une partition des pixels (resp. voxels) de l’image car chaque pixel (resp. voxel) appartient exactement à une seule région de l’image.
La notion d’adjacence est étendue aux régions : deux régions A et B sont α-adjacentes s’il existe un pixel a ∈ A (resp. voxel) et un pixel b ∈ B (resp. voxel) tel que a et b soient α-adjacents. Avec cette notion d’adjacence entre les régions, les notions de α-chemin et de composante α-connexe s’étendent directement aux régions. De plus, l’ordre lexicographique sur les pixels (resp. voxels) s’étend également directement aux régions en utilisant l’ordre sur le plus petit élément de chaque région.
[a][b]
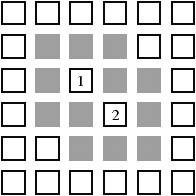
Figure 4.1: Exemple de paradoxes topologiques arrivant lorsque la connexité considérée est la même pour l’objet et pour son complémentaire. (a) Une 8-courbe fermée en gris dont le complémentaire est une seule composante 8-connexe. (b) Une 4-courbe fermée en gris dont le complémentaire est formée de trois composantes 4-connexes : l’extérieur et «deux intérieurs» : la première composante 4-connexe intérieure est composée du pixel 1 et la seconde est composée du pixel 2.
De nombreux travaux ont porté sur l’étude des problèmes topologiques dans un espace discret [HW83, Kov84, KR89, Kov89, KKM90a, KKM91, KU92]. En effet, l’utilisation d’une même relation d’adjacence pour un objet et son complémentaire entraîne des paradoxes topologiques, comme ceux présentés en 2D sur la Fig. 4.1. Ces problèmes sont liés au théorème de Jordan qui dit que dans ℝ2 le complémentaire de toute courbe fermée simple est formée exactement de deux composantes connexes distinctes : un extérieur et un intérieur. Ce théorème est l’un des piliers de la topologie du plan. Dans le plan, toute courbe de Jordan est homéomorphe au cercle unité S2. Dans ℝ3, la notion équivalente est celle de surface de Jordan qui est une surface fermée simple.
La résolution des problèmes topologiques dans un espace discret se fait en considérant une connexité différente pour l’objet et pour son complémentaire [Udu94, Kon02, EL03]. En 2D, le couple de connexité choisi (α, β) doit être tel que chaque α-courbe fermée doit séparer ℤ2 en deux composantes β-connexes. Un tel couple de connexité est appelé paire de Jordan. C’est le cas par exemple des couples (4,8) ou (8,4). En 3D, les couples de connexités à utiliser sont par exemple (6,18) et (6,26).
L’utilisation de ces couples de connexité va également intervenir dans la définition de la relation d’imbrication entre régions. Intuitivement, une région Ri est dite imbriquée2 dans une autre région Rj si Rj «entoure» complètement Ri. Cette notion est une relation topologique liée à la notion d’intérieur et d’extérieur du théorème de Jordan. De ce fait, comme les régions sont définies avec une seule connexité (4 en 2D, 6 en 3D), la connexité possible pour le complémentaire est limitée à 8 en 2D et 18 ou 26 en 3D.
Sur l’exemple de la Fig. 4.1, la région 3, composée des pixels noirs, n’est pas imbriquée dans la région 2 (la région gris clair) car il existe un 8-chemin entre un pixel de la région 3 et un pixel de la région infinie ne passant pas par la région 2. De ce fait, la région 3 est adjacente à une autre région que 2 appartenant à l’extérieur de 2 (même si dans ce cas cette zone de contact est limitée à un point). En 3D, le chemin doit être 18-connexe (et non 26-connexe) à cause de la propriété de quasi-variété des cartes combinatoires (cf. Def. 5 page ??). En effet, deux volumes d’une carte sont nécessairement adjacents par une face. Lorsque deux voxels sont 18-adjacents mais pas 6-adjacents, il y a une seule arête entre les voxels car le volume complémentaire est adjacent à ces deux voxels par deux faces qui sont voisines. Par contre, lorsque deux voxels sont 26-adjacents mais pas 18-adjacents, comme c’est le cas pour le voxel de la région 3 et le voxel de la région 1 dans la Fig. 4.1, les deux voxels ne partagent pas de sommet commun car les volumes ne partagent ni face, ni arête commune. De ce fait, les frontières des régions 1 et 3 de l’exemple sont disjointes et la région 3 touche uniquement la région 2 : la région 3 est donc imbriquée dans la région 2 ce qui fait que la seule connexité possible pour le complémentaire est la 18-connexité.
[a][b]
[c]

Figure 4.2: Exemples de relation d’imbrication et de relation d’imbrication directe. (a) La région 3 (pixels noirs) n’est pas imbriquée dans la région 2 (pixels gris clair) car elle est 8-adjacente à la région 1. (b) La région 3 (voxels noirs) est imbriquée dans la région 2 (voxels gris clair) car chaque 18-chemin entre la région 3 et la région infinie traverse la région 2. (c) La région 4 est directement imbriquée dans la région 1 bien que les régions ne soient pas adjacentes, car les trois régions 2, 3 et 4 appartiennent à la même composante 8-connexe imbriquée dans 1.
Il est simple de prouver que la relation d’imbrication est une relation d’ordre. Il est souvent suffisant de s’intéresser à la réduction transitive de la relation d’ordre afin de s’intéresser à la plus petite région contenant une région donnée : c’est la relation d’imbrication directe. Chaque région Ri (à l’exception de la région infinie) est directement imbriquée dans exactement une région Rj, Ri et Rj n’étant pas nécessairement adjacentes (cf. l’exemple de la Fig. 4.1). Par contre, chaque région possède entre 0 et k régions directement imbriquées. Dans la suite de ce manuscrit, nous utiliserons toujours la relation d’imbrication directe que nous appellerons imbrication pour simplifier.
De nombreux travaux ont porté sur la représentation des contours dans une image discrète [Kov89, KR89, KKM90b, KKM91, Fio95]. Ces travaux utilisent tous la notion de topologie interpixel en 2D ou intervoxel en 3D. Le principe intuitif de ces topologies est de ne pas considérer uniquement les éléments de l’image mais également tous les éléments de dimension inférieure séparant ces éléments. Par exemple en 2D, les pixels (éléments unitaires 2D) sont séparés par des lignels (éléments unitaires 1D), eux-mêmes séparés par des pointels (éléments unitaires 0D). En 3D, le principe est similaire en considérant les voxels (éléments unitaires 3D), surfels (éléments unitaires 2D), lignels et pointels (cf. exemple Fig. 4.3). Plus formellement, la notion de complexe cellulaire3 ℂn [Kov89] est la décomposition cellulaire de l’espace euclidien ℝn en grille régulière. Les notions d’adjacence et d’incidence se retrouvent dans ℂn directement à partir des notions de bord existantes dans ℝn. ℂin est l’ensemble des i-cellules de la décomposition cellulaire, et donc ℂn=∪i=0n ℂin.
Une autre manière d’introduire l’interpixel/intervoxel [KKM90b] est l’utilisation de la topologie produit. Tout d’abord, la topologie sur ℤ est définie en prenant tous les nombres pairs comme des fermés, et les nombres impairs comme des ouverts. Intuitivement, les fermés sont les pointels et les ouverts les lignels. Cette topologie est appelée topologie de Khalimsky ou topologie digitale. Elle s’étend ensuite directement en dimension n en effectuant le produit de n topologies de Khalimsky 1D (cf. l’exemple en 2D donné Fig. 4.4). Les ouverts sont les points ayant des coordonnées toutes impaires, et les fermés les points ayant des coordonnées toutes paires. Les autres points ayant les deux types de coordonnées sont des points mixtes. Il a été prouvé dans [KKM90b, KKM91] que la topologie de Khalimsky est équivalente à la topologie des complexes cellulaires. De plus, le lien entre les inter-éléments et la topologie produit de n ensembles d’entiers fournit un codage simple des inter-éléments [Lac03, KR04].
En 2D, la topologie de Khalimsky est donc la topologie produit ℤ × ℤ, où les ouverts sont les pixels, les fermés les pointels, et les lignels des points mixtes. En 3D, c’est ℤ × ℤ × ℤ avec les voxels étant les ouverts, les pointels les fermés, et les lignels et les surfels des points mixtes. Avec ces notations, deux inter-éléments sont incidents si la différence deux à deux entre chaque coordonnée est au plus un, et ils sont adjacents s’ils ont toutes leurs coordonnées égales sauf une, et si la différence pour cette coordonnée est deux (intuitivement les deux inter-éléments sont séparés par un inter-élément ce qui explique la différence de deux).
Il est possible de définir la notion de chemin et de connexité pour un ensemble d’inter-éléments de même dimension, de manière similaire aux définitions pour les pixels et voxels. Nous utilisons par exemple un chemin de surfels qui est défini par une suite de surfels (s1, …, sk) tel que chaque couple de surfels consécutifs si, si+1 soient adjacents.
Comme nous voyons dans la Def. 61 (que l’on peut trouver par exemple dans [Her98, Kov08]), un des avantages des approches inter-éléments est de pouvoir définir la frontière entre deux régions par un ensemble d’éléments entre les pixels (ou voxels) de la région et non pas par un ensemble de pixels (ou voxels) ce qui pose des problèmes de non-symétrie. En effet, les pixels (ou voxels) de la frontière entre deux régions A et B sont pris soit dans la région A, soit dans la région B. Rendre cette notion de frontière symétrique est possible en prenant à la fois les pixels (ou voxels) dans A et dans B, mais cela pose alors un autre problème qui est que la frontière n’est plus mince (c-à-d les éléments de la frontière ne sont plus voisins d’éléments appartenant à A et à B). Un autre avantage de la définition des frontières inter-éléments est de permettre la définition de l’analogue du théorème de Jordan dans le cas discret. Cela permet de prouver que toute frontière sépare l’espace discret en deux composantes connexes.
Ce type d’approche a été utilisé afin de définir les surfaces en intervoxels [Her98, Kov08]. Il faut noter que l’approche [Her98] n’utilise pas directement une approche inter-éléments mais utilise une approche à base de graphe, où les sommets du graphe correspondent aux voxels et les arêtes représentent la relation d’adjacence utilisée (par exemple la 6-adjacence). En pratique, si l’adjacence utilisée est la 6-adjacence, ce graphe peut être vu comme une représentation intervoxel ou chaque arête correspond à un surfel, et les deux approches sont alors équivalentes.
La Def. 61 introduit la définition de frontière d’une région en 2D et 3D en utilisant un espace interpixels/intervoxels.
Dans [Her98, Kov08], il est prouvé que ces frontières ont des «bonnes» propriétés lorsque le couple de connexité considéré est une paire de Jordan (ce qui est notre cas). En 2D, chaque composante connexe de la frontière est courbe de Jordan. En 3D, chaque composante connexe de la frontière est une surface presque-Jordan, c’est-à-dire qu’elle sépare l’espace en deux parties disjointes : un intérieur et un extérieur. Le terme presque-Jordan (défini dans [Her98]) est employé car ces surfaces discrètes séparent bien l’espace en deux composantes connexes, comme les surfaces de Jordan dans l’espace euclidien, mais ce ne sont pas forcément des 2-variétés (cf. exemple Fig. 4.5).
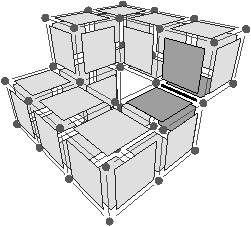
Figure 4.5: Exemple de surface presque-Jordan qui n’est pas une 2-variété. Le voisinage du lignel noir et épais est composé des quatre surfels en gris foncé et n’est pas homéomorphe à une 2-boule ouverte.
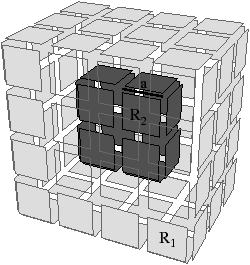
Figure 4.6: Exemple de frontière non-connexe. La frontière de R1 est composée de deux composante connexes de surfels car R1 possède une cavité.
Il faut noter que la frontière d’une région n’est pas forcément connexe, lorsqu’une région possède des cavités (cf. exemple Fig. 4.6). Dans ce cas, chaque frontière sépare la région et une composante connexe de son complémentaire. Pour pouvoir désigner plus précisément certaines parties de la frontière d’une région, nous la décomposons en sous-parties en introduisant les notions suivantes :
La notion d’arête/de face frontière (cf. Def. 62) est importante car nous souhaitons représenter la multi-adjacence inter-régions. Il faut donc savoir combien de fois deux régions se touchent et pour cela être capable d’identifier précisément une zone maximale de contact.
De manière intuitive, une arête/face frontière est un ensemble maximal et connexe d’éléments séparant les deux régions A et B, tel qu’il existe un chemin reliant tout couple d’éléments de cet ensemble. C’est l’existence ou non de ce chemin qui fait que deux éléments séparant A et B appartiennent à la même zone de contact ou pas.
La notion de surface frontière (cf. Def. 63) est quant à elle nécessaire pour traiter correctement le cas des régions ayant des cavités.
En 2D, chaque région R possède toujours une courbe frontière dite externe telle que l’intérieur de cette courbe contiennent tout les pixels de R, et entre 0 et k contours internes, un par cavité de R. Il en est de même en 3D pour la surface frontière externe et les éventuelles surfaces frontières internes. La frontière entre deux régions peut être vide lorsque les régions ne sont pas adjacentes, elle peut être composée d’une seule arête/face frontière lorsque les deux régions sont simplement adjacentes, ou de plusieurs arêtes/faces frontières lorsque les régions sont multi-adjacentes.
Il est facile de prouver que les arêtes (resp. faces) frontières forment une partition des courbes (resp. surfaces) frontières c’est-à-dire qu’une courbe (resp. surface) frontière est une union d’arêtes (resp. de faces) frontières, et que l’intersection de deux arêtes (resp. faces) frontières différentes est toujours vide. De même, les courbes (resp. surfaces) frontières forment une partition des frontières. De ce fait, la frontière d’une région R est l’union de toutes ses arêtes (resp. faces) frontières avec toutes les autres régions.
La première structure de données qui a été définie dans l’objectif de représenter une image segmentée est le graphe d’adjacence de régions (appelé RAG) [Ros74]. C’est un graphe associant un sommet à chaque région de l’image, et deux sommets sont reliés par une arête lorsque les deux régions correspondantes sont voisines.
[a][b]

Figure 4.7: Exemple de graphe d’adjacence des régions. (a) Une image 2D segmentée en régions. (b) Le RAG correspondant.
Ce graphe d’adjacence possède comme avantages d’avoir une définition simple et générique quelle que soit la dimension de l’image. Par contre, il possède comme inconvénients majeurs de ne pas représenter les adjacences multiples ni l’ordre entre les régions adjacentes à une même région, de ne pas différencier les relations d’adjacence et les relations d’imbrication, et de ne pas représenter toutes les cellules ni les relations d’incidence. Ces problèmes deviennent majeurs dès la dimension trois où le graphe d’adjacence contient alors très peu d’information topologique.
Pour résoudre ces problèmes, les graphes d’adjacences ont été étendus, tout d’abord de manière directe pour représenter la multi-adjacence, puis pour représenter l’ordre des régions autour d’une région. Pour cela, les graphes duaux ont été définis [WK94, KM95, Kro95].
L’idée principale des graphes duaux est de conserver deux graphes en parallèle, un multi-RAG d’un côté, et son graphe dual de l’autre. Le premier graphe représente les adjacences entre régions, avec des boucles lorsqu’une région contient des régions imbriquées. Ces boucles proviennent du fait que le graphe primal et son dual doivent tous deux être connexes. De ce fait, dans le dual, une arête permet à la région imbriquée d’être reliée à la région qui l’entoure. Cette arête devient, dans le graphe primal, une boucle autour de la région imbriquée.
[a][b]

Figure 4.8: Exemple de graphes duaux. (a) Une image 2d segmentée en régions. (b) Les graphes duaux correspondant. En noir le graphe primal (qui est un multi-RAG), et en gris son graphe dual.
En parcourant simultanément les deux graphes, il est possible de retrouver l’ordre des régions adjacentes à une région donnée. Sur l’exemple de la Fig. 4.8, le parcours des régions adjacentes à la région R1 de manière ordonnée se fait en partant d’une arête d’extrémité R1 et de son arête duale, par exemple (a,1). Ensuite, parmi les arêtes d’extrémité R1 (b, c et d), il en existe seulement deux ayant leur arête duale adjacente à l’arête 1. Ces deux arêtes sont les deux orientations possibles pour tourner autour de la région R1. Nous choisissons un couple, par exemple (b,2) et continuons le parcours en prenant parmi les arêtes incidentes à R1 celle telle que son arête duale soit adjacente à l’arête 2. Il y a encore deux possibilités, mais une des deux est l’arête précédente du parcours. Nous choisissons donc l’autre qui est (c,3). La dernière arête obtenue est (d,4) avant de revenir sur l’arête initiale (a,1).
Les graphes duaux résolvent certains problèmes du RAG. En effet, leurs principaux avantages sont qu’ils :
Mais il reste des inconvénients :
C’est pour répondre à ces problèmes que les travaux cherchant à utiliser les cartes combinatoires pour représenter des images se sont développés. En effet, une carte combinatoire 2D code explicitement l’ordre des arêtes autour des sommets, et représente toutes les cellules de la subdivision (sommets, arêtes et faces). Le principe des deux approches principales développées durant les thèses de Jean-Philippe Domenger, Luc Brun et Christophe Fiorio est d’utiliser une carte combinatoire pour représenter les frontières interpixels des régions de l’image. Les deux approches sont similaires sur la définition de la carte combinatoire utilisée, mais diffèrent pour le codage de la carte, le codage de la relation d’imbrication et pour l’algorithme calculant le modèle à partir de l’image.
Le premier modèle, appelé carte discrète, a été développé initialement durant la thèse de Jean-Philippe Domenger puis durant la thèse de Luc Brun (cf. exemple Fig. 4.2.3). Ce modèle utilise une carte combinatoire M=(B,α,σ) dans laquelle chaque arête correspond à une arête frontière entre deux régions de l’image, et chaque sommet correspond soit à l’intersection de plus de deux arêtes frontières (donc 3 ou 4 frontières vu que l’espace sous-jacent est discret), soit à un sommet arbitraire de l’arête frontière dans le cas d’une arête frontière fermée (cas de la frontière entre les régions R3 et R4 sur l’exemple). Chaque face (c’est-à-dire une orbite ⟨ϕ⟩) est identifiée par une étiquette, et λ donne pour chaque brin l’étiquette de sa face (ces faces sont numérotées de f1 à f7 sur l’exemple de la Fig. 4.2.3). La face représentant l’extérieur de la carte combinatoire est appelée face infinie (la face f1 de l’exemple) tandis que les autres faces sont appelées faces finies. Par convention, les brins sont numérotés de telle manière que pour chaque brin b de numéro i, le brin α(b) soit numéroté −i. Cette convention permet, lorsque les brins sont représentés dans un tableau, de ne pas avoir besoin de représenter explicitement l’involution α. Par contre, cela complexifie les mises à jour lorsqu’il faut modifier cette involution, car cela nécessite de réorganiser les brins au sein du tableau.
[a][b]
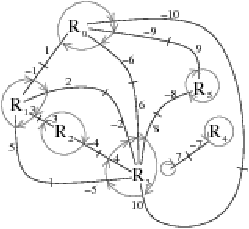
Figure 4.9: (a) La carte discrète et (b) le graphe topologique des frontières de l’image de la Fig. 4.2.2. Les brins des deux modèles sont numérotés de manière identique pour faciliter la comparaison.
De par sa définition, lorsqu’une région est imbriquée dans une autre région (comme la région R4 dans l’exemple de la Fig. 4.2.3), la carte combinatoire n’est pas connexe. En effet, il n’y a pas d’arête frontière reliant les deux courbes frontières représentant l’extérieur de la face et la cavité. Dans ce cas, la carte est composée d’un ensemble de composantes connexes, chacune ayant une face infinie (sur l’exemple de la Fig. 4.2.3, il y a deux composantes connexes donc deux faces infinies f1 et f6). Il n’existe pas de relation dans la carte combinatoire entre les différentes composantes connexes4. Pour résoudre ce problème, les relations d’imbrication sont représentées à l’aide de deux fonctions sur les étiquettes des faces : Parent et Children. La fonction Parent associe à chaque face infinie l’étiquette de la face finie la contenant (à l’exception de la face infinie englobant l’image qui n’est contenue dans aucune face). La fonction Children associe à chaque face finie l’ensemble des étiquettes des faces infinies imbriquées dans la face (par exemple Parent(f6)=f4 et Children(f4)={f6}). Ces deux fonctions permettent de parcourir l’ensemble des courbes frontières d’une région donnée, et permettent également de retrouver la région entourant une autre région. Enfin, la géométrie de la carte discrète est codée à l’aide d’une matrice d’éléments interpixels dans laquelle seuls les pointels associés aux sommets, et seuls les lignels appartenant aux frontières sont allumés. Chaque brin est associé avec un couple (pointel, lignel) donnant le point de départ et la direction initiale de l’arête frontière. À partir de ce point de départ, il est simple de parcourir tous les lignels de l’arête frontière en suivant les lignels allumés jusqu’à trouver un pointel allumé indiquant la fin de l’arête frontière.
Les cartes discrètes ont été ensuite étendues en 3D [BDDW99, BDD01, Des01, BDDV03] en utilisant un principe similaire à la solution proposée en 2D. Les principaux changements sont l’utilisation d’une carte combinatoire 3D codée par une matrice d’éléments intervoxels, et représentant les régions. Un brin est donc représenté par un triplet (pointel, lignel, surfel), et des fonctions sont définies sur ces triplets pour retrouver directement les différentes relations sur les brins. Mais cette solution n’a pas pu être utilisée en pratique car car la représentation des brins par un triplet n’est possible que pour des images étiquetées dites faiblement bien-composées, c’est à dire dans lesquelles il n’existe pas deux voxels 18-adjacents appartenant à la même région. Cela rend ce modèle peu utilisable en pratique, car il nécessite une étape de normalisation d’une image avant de pouvoir en calculer la carte discrète, étape itérative et donc coûteuse, qui de plus modifie les régions de l’image segmentée. Cela rend également difficile les opérations puisqu’après chaque modification de la carte, il faut vérifier si cela n’a pas entraîné une configuration interdite, et le cas échéant régler le problème, à nouveau de manière itérative. Pour ces raisons, autant l’approche 2D a été utilisée afin de résoudre des problématiques de segmentation d’images [BDB97, BD97, BB98, BDM03], autant le problème lié à l’approche 3D c’est avéré bloquant. De ce fait, les travaux successeurs de cette approche ont consisté à repartir sur un modèle à base de graphe d’adjacence étendu, en le liant avec une matrice d’éléments intervoxels [BBDD08, Bal09, BBD09].
Le second modèle, appelé graphe topologique des frontières (TGF), a été développé durant la thèse de Christophe Fiorio (cf. exemple Fig. 4.2.3). Son principe, très proche de la carte discrète, est toujours d’utiliser une carte combinatoire représentant une arête par arête frontière entre deux régions de l’image. Les différences portent simplement sur :
La carte combinatoire et les régions sont liées car chaque brin connaît sa région d’appartenance. Enfin, une région supplémentaire (la région infinie) est ajoutée qui représente le complémentaire de l’image.
La première différence est anecdotique car les utilisations d’une carte ou de sa duale sont équivalentes. La seconde différence change la manière de parcourir la structure. Ici, la notion de région est maintenant explicitée contrairement aux cartes discrètes. De ce fait, retrouver les courbes frontières internes d’une région se fait ici à l’aide de la liste des brins, ce qui est équivalent à l’utilisation de la fonction Children pour les cartes discrètes. Enfin, une dernière différence entre les deux modèles concerne la manière usuelle de les dessiner, comme nous pouvons le vérifier sur la Fig. 4.9. Pour les cartes discrètes, les arêtes sont dessinées le long des frontières des régions ce qui permet de faire plus facilement le lien avec la géométrie des régions, alors que pour le TGF les arêtes sont dessinées de manière similaire à un RAG ce qui rend son interprétation visuelle plus délicate. Mais la encore, c’est une différence négligeable, d’autant plus que c’est uniquement une habitude et qu’il est possible de dessiner le TGF de manière similaire aux cartes discrètes (comme nous l’avons présenté Section 2.2.2).
Lorsque j’ai débuté ma thèse, l’objectif était d’étendre ces modèles en 3D. Les cartes combinatoires avaient déjà été définies en dimension quelconque, il semblait alors naturel de vouloir poursuivre les travaux autour de la carte discrète ou du TGF afin d’utiliser ces cartes combinatoires pour représenter des images 3D. Mais cette tâche s’est vite avérée très difficile de par la définition directe de ces deux modèles. En effet, le problème en 2D est suffisamment simple pour que nous puissions définir directement la subdivision voulue (principalement une arête par arête frontière) et la carte associée (car une arête est toujours composée de deux brins dans une carte combinatoire 2D fermée). Cela devient beaucoup plus délicat en 3D où il faut définir la notion de surface frontière en intervoxel, mais cette notion n’est plus suffisante car nous devons nous intéresser aux bords de ces surfaces et à la manière dont ils se rejoignent. Les cas possibles deviennent beaucoup plus nombreux et complexes à visualiser. Enfin, le nombre de brins associés aux cellules de la subdivision peut maintenant être quelconque ce qui complexifie encore plus la tâche.
Pour résoudre ce problème, je me suis reposé la question de la définition d’un modèle 2D mais dans l’optique d’avoir une définition pouvant s’étendre directement en dimension supérieure. C’est ce qui m’a amené à définir la carte topologique, qui en 2D est très proche des deux modèles qui existaient déjà, mais dont l’avantage principal est sa définition progressive basée sur la notion nouvelle de niveaux de simplification. Ces niveaux facilitent la définition du modèle, sont directement extensibles en dimension supérieure, fournissent directement un algorithme de construction et enfin facilitent l’étude des propriétés. En effet, un niveau de simplification s’obtient à partir du niveau précédent par application d’un seul type d’opération, ce qui simplifie l’étude des propriétés en diminuant le nombre de cas à considérer. Une version préliminaire de ces travaux a été présentée dans [BDF00, BDF01], un résumé dans [DB07], et les versions complètes ont été publiées en 2D dans [DBF04] et en 3D dans [Dam08].
Pour définir la carte topologique 2D, c-à-d la carte combinatoire minimale décrivant une image 2D étiquetée, nous avons défini la notion de niveaux de simplification. Le principe général de ces niveaux de simplification consiste à donner une suite de définitions constructive de chaque niveau à partir du niveau précédent. Chaque niveau s’obtient à partir du niveau précédent par application d’un ensemble d’opérations de suppression de même type. Définir la carte topologique revient donc à définir le niveau initial, puis les propriétés des cellules à supprimer pour chaque nouveau niveau.
Pour décrire une image étiquetée, la carte initiale va représenter chaque élément interpixel de l’image, le premier niveau va supprimer les arêtes séparant deux pixels de même étiquette, et le dernier niveau va supprimer les sommets se trouvant au milieu d’une arête frontière. Ces niveaux sont définis plus formellement par les Defs. 64, 65 et 66.
La carte combinatoire initiale C=(B,β1,β2), appelée niveau 0, représente chaque élément interpixel de l’image (cf. Fig. 4.10). Cette carte contient (n × m)+1 faces, et ne représente pas les frontières des régions mais tous les éléments de l’image.
[a][b]

Figure 4.10: Le niveau 0 d’une image 2D. (a) Une image étiquetée. (b) La carte de niveau 0 correspondante.
La carte de niveau 1 s’obtient en supprimant toute les arêtes séparant deux pixels de même étiquette (cf. Fig. 4.11). Après ces suppressions, les seules arêtes restantes séparent deux régions distinctes : cette carte représente donc les frontières interpixels des régions de l’image. C’est uniquement lors de la construction de ce niveau que les données de l’image sont prises en compte afin de décrire les régions de l’image.
[a][b]
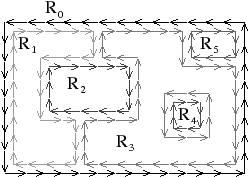
Figure 4.11: La carte de niveau 1 d’une image. (a) Le niveau 0. (b) La carte de niveau 1 correspondante.
La dernière étape de simplification utilise uniquement la carte combinatoire et les propriétés des cellules.
La carte de niveau 2 s’obtient en supprimant successivement tous les sommets supprimables et de degré deux de la carte du niveau précédent (cf. Fig. 4.12). En effet, ces sommets appartiennent nécessairement au milieu d’une même arête frontière puisque, comme nous l’avons vu lors de la présentation des modèles existants Section 4.2.3, les sommets extrémités de ces frontières sont nécessairement soit incidents à une boucle (donc de degré un), soit de degré trois ou quatre.
[a][b]
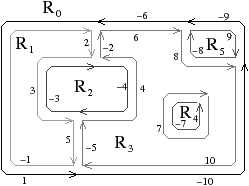
Figure 4.12: La carte de niveau 2 d’une image. (a) Le niveau 1. (b) La carte de niveau 2 correspondante. La numérotation des brins utilisée ici est la même que pour la Fig. 4.9 pour faciliter la comparaison.
Dans cette définition, il est nécessaire d’utiliser les deux conditions supprimable et de degré deux, pour résoudre correctement le cas des boucles (dans le cas général, si le sommet est incident à deux arêtes distinctes, il est de degré deux et supprimable). Deux cas peuvent se produire. Premièrement, lorsque deux boucles sont incidentes au même sommet (cf. Fig. 4.3.2), le sommet est de degré deux (incident à exactement deux arêtes distinctes), mais il n’est pas supprimable. Le second cas est celui d’un sommet de degré un (cf. Fig. 4.3.2). Ce type de sommet est supprimable mais ne doit pas l’être sous peine de faire disparaître totalement l’arête frontière associée à la boucle (l’arête frontière entre R1 et R2 sur l’exemple). Il n’y a pas d’autre cas à considérer que ces deux cas de par les propriétés de l’espace discret sous-jacent qui rend impossible plus de deux boucles autour d’un même sommet.
[a][b]

Figure 4.13: Cas pour lesquels la Def. 66 utilise les deux conditions : sommets supprimables et de degré deux. (a) Le cas d’un sommet s de degré deux qui ne doit pas être supprimé car il n’est pas supprimable. (b) Le cas d’un sommet s supprimable qui ne doit pas être supprimé car il n’est pas de degré deux.
Il faut noter le terme successivement qui est nécessaire pour traiter correctement le cas des arêtes frontières fermées (comme la frontière entre R3 et R4 dans l’exemple). En effet, tous les sommets de ce type de frontière sont initialement supprimables et de degré deux. Si les suppressions se font de manière simultanée, tous ces sommets vont être supprimés et l’arête frontière va disparaître. Par contre, en effectuant les suppressions de manière successive, le dernier sommet considéré sera alors de degré un puisqu’il ne restera plus qu’une seule arête : de ce fait il sera conservé. Il faut noter que la position de ce sommet dépend de l’ordre de suppression des sommets, mais ce n’est pas important car topologiquement toutes les configurations obtenues sont équivalentes.
Cette carte de niveau 2 est équivalente aux deux modèles qui existaient au préalable (la carte discrète et le graphe topologique des frontières). La carte utilisée est la même que celle du TGF : la permutation relie les arêtes frontières successives d’une même courbe frontière contrairement à la carte discrète qui est la carte duale. Comme dans ces deux modèles, nous devons rajouter des informations afin de représenter les relations d’imbrication. Nous avons choisi de les représenter par un arbre d’imbrication des régions contenant chaque région de l’image. Pour lier les deux structures de données, chaque brin b connaît sa région d’appartenance, notée region(b), et chaque région connaît un de ses brins (qui doit vérifier des propriétés spécifiques comme expliqué ci-dessous).
La racine de l’arbre d’imbrication est toujours la région infinie. Chaque région R connaît la région dans laquelle elle est directement imbriquée (notée father(R)). À l’inverse, chaque région R connaît les régions qui sont directement imbriquées dans R. Pour avoir un accès direct aux cavités de R, ces régions sont regroupées par composantes 8-connexe. En effet, chaque composante 8-connexe de régions directement imbriquée dans R représente une même cavité (cf. exemple Fig. 4.14). Cette définition respecte la contrainte, déjà évoquée plus haut, que la connexité de l’objet doit être différente de la connexité du fond [KR89]. Dans notre cas, l’objet est la région considérée R qui est 4-connexe par définition, et le fond est l’union de toute les autres régions qui est donc considérée avec la 8-connexité. De ce fait, une région R a pour fils l’ensemble des plus petites régions (au sens lexicographique) de chaque composante 8-connexe de régions imbriquées, les autres régions étant accessibles à partir de ces régions par une relation d’appartenance à la même composante connexe.
[a][b]
[c]

Figure 4.14: Exemple d’arbre d’imbrication des régions. (a) Une image 2D étiquetée, ses régions, et ses frontières interpixels. (b) La carte de niveau 2 correspondante. Cette carte est composée de trois composantes connexes car la région R1 possède deux cavités : une première composée des régions {R2,R3} et une seconde des régions {R4,R5,R6}. (c) L’arbre d’imbrication associé. R1 a pour fils R2 et R4 (les plus petites régions de chaque composante 8-connexe de régions imbriquées), les autres régions sont accessibles par la relation sameCC symbolisée par les ensembles pointillés.
Nous identifions un brin particulier de chaque région R appelé brin représentant, noté rep(R). Ce brin représentant doit vérifier la propriété : region(β2(rep(R))<R (la région du brin atteignable par β2 à partir du brin représentant doit être plus petite que la région R). Cette propriété garantit que le brin représentant est situé sur le contour frontière extérieur de la région (car les régions imbriquées dans R sont forcément plus grandes que R dans l’ordre lexicographique). De plus, cela garantit également que pour chaque ensemble 8-connexe de régions, en prenant la plus petite région de cet ensemble A, la région du brin β2(rep(A)) est toujours la région dans laquelle A (et donc toute les régions de la composante 8-connexe) est directement imbriquée.
Dans la carte de la Fig. 4.3.3, le brin représentant de R1 est forcément le brin 1 (car c’est le seul brin de R1 vérifiant la propriété ci-dessus). Le brin représentant de R2 est le brin 2 et celui de R4 est le brin 4. Dans ces trois cas, nous pouvons vérifier que le brin relié par β2 au brin représentant appartient à la région dans laquelle est imbriquée la région du brin (par exemple pour le brin 2 qui appartient à la région R2, β2(2) appartient à la région R1 et R2 est bien imbriquée dans R1).
Une région R est dite isolée lorsque qu’elle est la seule région d’une composante 8-connexe. Une région de ce type est imbriquée dans une région englobante et n’a pas d’autre région adjacente sauf éventuellement des régions imbriquées (formant des cavités et donc n’appartenant pas à la même composante 8-connexe).
L’arbre d’imbrication des régions et les propriétés sur le brin représentant font qu’il est possible de parcourir directement chaque courbe frontière d’une région R donnée : la courbe extérieure est obtenue par l’orbite ⟨β1⟩(rep(R)), et ses éventuelles courbes frontières intérieures s’obtiennent par les orbites ⟨β1⟩(rep(β2(F)) pour chaque fils F de R. De plus, l’ordre des régions et la position du brin représentant se calculent sans surcoût lors du balayage de l’image pour construire la carte [Dam08].
La carte combinatoire de niveau 2 plus l’arbre d’imbrication des régions permet de représenter la topologie de l’image (les régions et les cellules de la subdivision, les relations d’incidence, d’adjacence et d’imbrication). Mais il faut également représenter la géométrie des régions. Pour cela, nous pouvons utiliser la même solution que celle des cartes discrètes, c’est-à-dire utiliser une matrice d’éléments interpixels dans laquelle nous allumons les lignels appartenant à une frontière interpixel et les pointels à l’intersection de plus de deux arêtes frontières (cf. exemple Fig. 4.3.3). Il suffit alors d’associer à chaque brin un couple (pointel, lignel) pour donner le point de départ et la direction de l’arête frontière associée pour être capable de retrouver la géométrie de chaque élément en combinant les informations données par la carte (par exemple pour retrouver toutes les courbes frontières d’une région) et celles données par la matrice.
Nous avons expérimenté d’autres types de représentation de la géométrie [Dam01, DBF04] dans lesquelles nous associons des listes de points 2D à chaque arête orientée (cf. exemple Fig. 4.15), ou une autre variante dans laquelle nous associons également un point 2D à chaque sommet de la carte (cf. exemple Fig. 4.16) ce qui évite de représenter plusieurs fois les points extrémités des arêtes frontières. Il est possible d’envisager d’autres solutions, par exemple en utilisant des cartes généralisées 1D afin de s’affranchir de l’orientation, voire d’associer des ensembles de pixels à chaque région…Chaque méthode a ses propres avantages et inconvénients qui, de manière classique, oscillent entre gain en espace mémoire et gain en temps d’accès aux informations. La représentation par matrice d’éléments interpixel est plus coûteuse en espace mémoire, mais facilite les parcours, par exemple pour parcourir les pixels à l’intérieur d’une région donnée. Les représentations de la géométrie des frontières offrent une représentation plus compacte en mémoire, facilitent les parcours de la géométrie des frontières qui est donnée explicitement, mais rends plus complexe le parcours des pixels des régions qui ne sont pas manipulables directement.
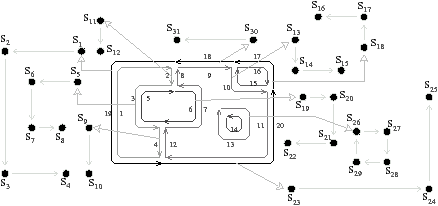
Figure 4.15: Exemple de représentation de la géométrie en associant une liste de points 2D à chaque arête orientée. Les sommets aux extrémités des listes sont dupliqués entre toutes les listes des arêtes incidentes aux mêmes sommets.
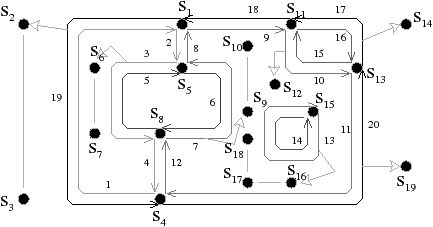
Figure 4.16: Exemple de représentation de la géométrie en associant une liste de points 2D à chaque arête orientée privée de ses extrémités, et un point 2D à chaque sommet. Ces sommets ne sont donc plus dupliqués.
Nous appelons carte topologique le modèle composé de la carte combinatoire de niveau 2, de l’arbre d’imbrication des régions, et d’une représentation de la géométrie. Ce modèle est équivalent aux deux modèles qui existaient déjà au démarrage de mes travaux, mais nous pouvons observer dans les différentes définitions des niveaux les avantages de notre approche par simplifications successives. Les définitions sont simples car progressives. Nous n’avons pas besoin de définir la notion d’arête frontière mais simplement de nous intéresser aux éléments à supprimer (par contre nous utilisons les arêtes frontières pour prouver les propriétés des cartes topologiques). De plus, il est facile d’ajouter des niveaux de simplification intermédiaires comme par exemple dans [DBF04] où nous avions un niveau supplémentaire pour lequel chaque arête correspondait à un ensemble de lignels alignés. Enfin, le principal avantage de ces niveaux de simplification est de s’étendre directement en dimension supérieure.
Afin de définir la carte topologique 3D, nous appliquons le même principe qu’en dimension 2 des niveaux de simplification. Nous commençons par définir une carte combinatoire représentant chaque élément intervoxel de l’image (cf. Fig. 4.17) puis nous la simplifions progressivement.
[a][b]

Figure 4.17: Le niveau 0 d’une image 3D. (a) Une image étiquetée. (b) La carte de niveau 0 correspondante (pour des raisons de visibilité, nous ne dessinons pas de manière générale le volume infini).
Le niveau 1 est totalement équivalent au niveau 1 en dimension 2 en remplaçant pixel par voxel : il consiste à fusionner les voxels pour représenter les frontières des régions (cf. Fig. 4.18).
[a][b]

Figure 4.18: Le niveau 1 d’une image 3D. (a) La carte de niveau 1 obtenue à partir de la carte de niveau 0 de la Fig. 4.4. (b) La subdivision correspondante.
Cette carte de niveau 1 représente les frontières de chaque région. En suivant le même principe que pour la dimension 2, nous allons maintenant simplifier cette carte pour représenter chaque relation d’adjacence de manière unique. Le fait d’avoir augmenté l’espace d’une dimension entraîne de manière logique un niveau de simplification supplémentaire : nous allons tout d’abord supprimer des arêtes puis supprimer des sommets. Les suppressions doivent être réalisées par dimensions décroissantes car la suppression d’une i-cellule diminue le degré des (i−1)-cellules. De ce fait, une (i−1)-cellule peut devenir supprimable après la suppression de i-cellules. Traiter les cellules par dimensions décroissantes permet de garantir qu’à la fin du traitement il ne reste plus de cellule supprimable.
Pour définir le niveau 2, nous devons supprimer deux types d’arêtes : les arêtes supprimables et de degré deux (de manière similaire au cas de la dimension 2) et les arêtes pendantes.
Nous devons utiliser les deux conditions supprimable et de degré deux, pour les mêmes raisons qu’en 2D : le cas d’une arête entre deux faces repliées sur l’arête (cf. Fig. 4.4.2), et le cas d’une région isolée (cf. Fig. 4.4.2). Dans le premier exemple, l’arête incidente à R2 et à R3 est conservée car elle est de degré deux mais non supprimable. Dans le second exemple, la dernière arête de la face de R2 est conservée car elle est de degré un et n’est pas pendante (c’est une arête isolée). Dans ces deux cas, la suppression de l’arête entraînerait la suppression d’une face (et même de deux faces dans le premier cas) et donc la perte d’une relation d’adjacence entre les deux régions incidentes à la face.
[a][b]
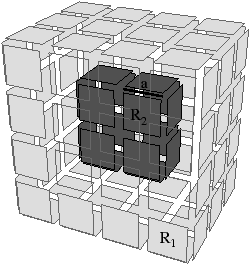
Figure 4.19: Cas pour lesquels les deux conditions de la Def. 69 sont nécessaires. (a) Le cas d’une arête a de degré deux qui ne doit pas être supprimée car elle n’est pas supprimable (cette configuration est obtenue en supprimant toutes les autres arêtes incidente à R2 et R3 qui étaient toutes supprimables et de degré deux ou pendantes). (b) Le cas d’une arête a supprimable mais qui ne doit pas être supprimée car elle n’est pas de degré deux (configuration obtenue en supprimant toutes les autres arêtes incidentes à R2). L’arête restante est n’importe quelle arête de la subdivision initiale et dépend de l’ordre de traitement des arêtes.
Mais il est nécessaire d’ajouter une condition pour supprimer les arêtes pendantes. En effet, une arête de degré deux dans la carte de niveau 1 peut devenir pendante après certaines suppressions d’arêtes (cf. Fig. 4.20). Il faut noter que ce type de cas ne se posait pas en dimension 2 car un sommet ne peut pas être pendant.
[a][b]
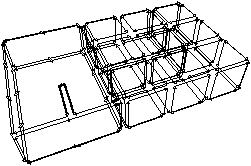
Figure 4.20: Le niveau 2 d’une image 3D en cours de construction. (a) La carte de niveau 1 de la Fig. 4.18. (b) La carte de niveau 2 en cours de construction. Certaines arêtes de degré deux ont été supprimées. L’arête en gras était de degré deux dans la carte de niveau 1 et est maintenant de degré un.
Ne pas supprimer les arêtes de degré un (à l’exception des arêtes pendantes) fait que nous n’allons pas supprimer une face composée d’une seule arête (cas de la représentation minimale de la sphère, comme pour la région R2 dans la Fig. 4.4.2), ni supprimer une arête interne à une face dont la suppression aurait pour conséquence que la face ne soit plus homéomorphe à un disque (cf exemple Fig. 4.21).
[a][b]
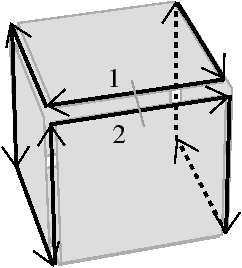
Figure 4.21: Cas d’une arête de degré un non pendante. (a) Une configuration composée de quatre régions, R0 étant la région infinie englobant les trois autres régions. (b) La face séparant R0 et R2 dans la carte de niveau 2 (en fait seule la demi-face est dessinée, il faudrait représenter la même demi-face du coté de R0). L’arête {1,2} est de degré un mais n’est pas pendante. Cette arête doit être conservée pour préserver la face homéomorphe à un disque, ou dit autrement afin de ne pas déconnecter l’orbite face en deux.
Les arêtes de degré un non pendantes sont appelées arêtes fictives car contrairement aux autres arêtes, elles ne représentent pas le bord d’une face frontière entre deux régions. Par opposition, les autres arêtes sont appelées arêtes réelles.
Pour supprimer toute les arêtes données par la Def. 69, nous devons être capables de tester si une arête est supprimable et de degré deux ou pendante.
Tester si une arête est supprimable se fait en testant pour un brin b de l’arête si β23(d)=β32(d) (cf. Def. 49). Si ce test est vrai pour un brin, alors il est vérifié pour chaque brin de l’arête5 et l’arête est supprimable par définition. Il faut alors tester si l’arête correspond à un des deux cas de la Def. 49 : une arête de degré deux, ou une arête pendante. L’arête est de degré un si les deux brins b et β2(d) appartiennent à la même face, c-à-d β2(d) ∈ ⟨β1⟩(d). Il est possible d’effectuer ce test en parcourant l’orbite ⟨β1⟩(d) et en vérifiant si le brin β2(d) est trouvé lors de ce parcours. Mais la complexité de cette opération est linéaire en nombre de brins de la face contenant l’arête. Comme ce test doit être fait pour chaque arête de la carte, cela nous donne une complexité quadratique pour la construction de la carte de niveau 2. Pour améliorer cette complexité, nous utilisons les arbres union-find [Tar75] qui permettent de manipuler efficacement des ensembles disjoints.
Cette structure de données est manipulée à l’aide de deux primitives : find qui retourne le représentant d’un élément donné, et union qui fusionne deux ensembles. L’intérêt de cette structure est que, en utilisant deux optimisations simples, la complexité amortie d’un ensemble de m opérations union-find sur un ensemble contenant n éléments est en O(n.α(m,n)) avec α(m,n) étant l’inverse de la fonction Ackermann qui est une fonction qui croit très lentement, et qui est inférieure à 5 dans les cas pratiques (cf. [Tar75] pour l’étude de complexité).
Lors de la création des volumes pour la construction du niveau 0, à chaque face est associé un arbre union-find étant le seul élément de son ensemble. Lors de la suppression d’une arête de degré deux, les deux arbres union-find des faces incidentes à l’arête (face(d) et face(β2(d))) sont fusionnées. Avec ce principe, tester si β2(d) ∈ ⟨β1⟩(d) se fait simplement en testant si find(d)=find(β2(d)). En utilisant les heuristiques sur les arbres union-find et l’étude de la complexité amortie des opérations, tester si une arête est de degré un s’effectue alors en temps constant, et la complexité de la construction de la carte de niveau 2 est linéaire en le nombre de brins de la carte.
Lorsque l’arête est de degré un, il reste à tester si elle est pendante ou non. La Fig. 4.22 montre les quatre configurations possibles d’une arête de degré un en fonction du degré des sommets de l’arête. Pour chaque sommet, nous distinguons le cas du sommet de degré un car le sommet est alors uniquement incident à l’arête supprimée, du cas du sommet de degré supérieur à un car le sommet est alors incident à au moins deux arêtes. Il y a deux cas distingués par sommet, et une arête est composée de deux sommets (car la carte de niveau 2 ne peut pas contenir de boucle), ce qui donne les quatre cas possibles de la Fig. 4.22. Pour chacun de ces cas, nous sommes capables de caractériser localement la configuration correspondante par un simple test sur le voisinage d’un brin de l’arête, les formules étant données dans la légende de la figure. De plus, chaque test est réalisé en temps constant. Les deux cas des Figs. 4.4.2 et 4.4.2 sont les cas des arêtes pendantes, les deux autres cas sont des arêtes fictives car l’arête considérée est de degré un mais non pendante.
[a] [b]
[c]
[d]
Figure 4.22: Les quatre configurations possibles de faces autour d’une arête de degré un en fonction du degré de ses sommets. (a) Les deux sommets sont de degré un : l’arête est isolée et donc fictive (de degré un et non pendante). β0(b)=β2(b) et β1(b)=β2(b). (b) Une arête pendante : un sommet est de degré un, l’autre de degré supérieur à un. β0(b)=β2(b) et β1(b) ≠ β2(b). (c) Une arête pendante : cas symétrique avec β1(b)=β2(b) et β0(b) ≠ β2(b). (d) Les deux sommets sont de degré supérieur à un, l’arête est fictive (de degré un et non pendante). β0(b)≠ β2(b) et β1(b)≠ β2(b).
Nous avons prouvé que les simplifications effectuées pour calculer le niveau 2 à partir du niveau 1 préservent la topologie de la partition en montrant que les propriétés suivantes sont vérifiées :
Le premier point garantit que les surfaces présentes dans la carte de niveau 1 sont préservées dans la carte de niveau 2 ; le second point garantit que chaque face est représentée par une seule orbite ⟨β1⟩ et donc que les surfaces sont représentées par des complexes cellulaires 2D, et le dernier point garantit que la topologie des surfaces est préservée (cf. [Dam08] pour plus de détails sur les propriétés des niveaux et les preuves).
Ces trois propriétés permettent de prouver que les nombres de Betti restent inchangés entre le niveau 1 et le niveau 2. En effet, le nombre de composantes connexes et le nombre de cavités sont donnés par le nombre de surfaces frontières : chaque région est représentée par une surface frontière pour son bord externe, et une surface frontière par cavité. Le nombre de tunnels est quant à lui lié au nombre de surfaces frontières, et à la caractéristique d’Euler de chaque surface (cf. Section 2.1.4 page ??).
Nous pouvons voir Fig. 4.23 la carte de niveau 2 de l’exemple utilisé Fig. 4.18. Cette carte est désormais composée de 16 sommets, 18 arêtes, 6 faces, et 4 volumes.
[a][b]
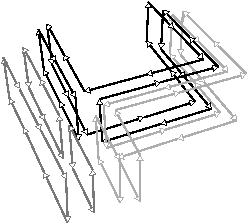
Figure 4.23: Le niveau 2 d’une image 3D. (a) La carte de niveau 1 de la Fig. 4.18. (b) La carte de niveau 2 dans laquelle toutes les arêtes de degré deux et les arêtes pendantes ont été supprimées.
La dernière passe de simplification concerne la suppression de sommets. Comme en dimension 2, nous devons supprimer les sommets supprimables et de degré deux afin de ne pas supprimer un sommet incident à une seule arête (cas du sommet supprimable mais de degré un), et pour ne pas supprimer un sommet incident à deux boucles (cas du sommet de degré deux mais non supprimable). En effet, dans les deux cas, la suppression du sommet entraînerait la disparition des arêtes et des faces incidentes, et donc la disparition d’une relation d’adjacence entre les volumes incidents. Mais un traitement spécifique est nécessaire pour obtenir une carte ne dépendant pas de la position des arêtes fictives. Ce traitement est basé sur le décalage des arêtes fictives.
Nous appelons sommet fictif un sommet incident uniquement à des arêtes fictives, et par opposition sommet réel un sommet incident à au moins une arête réelle.
La Def. 70 donne la définition de la carte de niveau 3 intégrant la suppression des sommets supprimables et de degré deux et le décalage des arêtes fictives.
Cette définition distingue deux cas pour les sommets réels et les sommets fictifs (cf. exemples Fig. 4.24). Tout d’abord pour les sommets réels, il existe au moins une arête réelle incidente. Le sommet doit être supprimé s’il est supprimable et de degré deux après avoir décalé toutes les arêtes fictives lui étant incidentes. Les deux conditions (supprimable et de degré deux) sont identiques au cas 2D et proviennent des mêmes considérations : chercher à supprimer les sommets entre deux arêtes distinctes en préservant les boucles qui sont les bords de faces frontières. Mais avant de tester ces conditions, nous commençons par décaler toutes les arêtes fictives incidentes au sommet. En effet, ces arêtes sont nécessaires pour préserver la topologie de la partition en conservant chaque face homéomorphe à un disque topologique, mais la position de ces arêtes n’est pas importante. Afin de garantir l’obtention de la carte minimale en nombre de cellules, nous devons garantir qu’un sommet n’est pas non supprimable à cause de la présence d’une arête fictive. En effet, nous obtiendrions alors une carte non minimale puisqu’il existe une autre carte avec moins de cellules, obtenue en changeant la position de l’arête fictive. L’étape de décalage des arêtes fictives résout ce problème en garantissant qu’un sommet réel est supprimé indépendamment de la position des arêtes fictives.
[a][b]
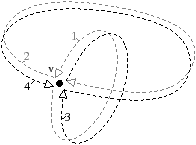
Figure 4.24: Les différents cas possibles de sommets : fictifs ou non, supprimables et de degré deux ou non. (a) Deux sommets satisfont les conditions de la Def. 70 et seront supprimés : v2 est non fictif, supprimable et de degré deux après avoir décalé les arêtes fictives incidentes ; v4 est fictif, supprimable et de degré deux après avoir décalé les arêtes fictives incidentes sauf une arête non boucle. Deux sommets ne satisfont pas les conditions et seront conservés : v1 est de degré trois après avoir décalé les arêtes fictives ; v3 est de degré un après avoir décalé les arêtes fictives. (b) Cas d’une représentation minimale d’un tore : le seul sommet v n’est pas supprimé car il est fictif et il n’existe pas d’arête non boucle incidente à v.
L’opération de décalage d’arête présentée au chapitre 3 (page ??) préserve la topologie de la partition car chaque arête décalée est ici de degré un. De ce fait, la modification est locale à la face et la seule modification topologique qui pourrait se produire est la déconnexion de la face en deux, ce qui n’est pas possible. De plus, il est facile de vérifier que le nombre de cellules de la partition reste constant avant et après le décalage d’arête. Dans la définition du niveau 3, après avoir décalé toutes les arêtes fictives incidentes au sommet réel, ce sommet n’est plus incident à une arête fictive et nous pouvons donc tester simplement s’il est supprimable et de degré deux. Si une arête réelle incidente au sommet considéré est une boucle, le sommet ne sera soit pas supprimable, soit pas de degré deux, ce qui garantit qu’aucune face ne disparaisse de par la suppression du sommet.
Pour les sommets fictifs, le principe est un peu différent : en effet, le décalage ne peut pas concerner toutes les arêtes fictives incidentes au sommet (car ce serait alors toutes les arêtes), mais il concerne toutes les arêtes fictives sauf une arête non boucle. Il y a donc deux sous cas selon qu’il existe une arête non boucle incidente au sommet ou non. Dans le premier cas (par exemple le sommet v4 dans la Fig. 4.4.3), plusieurs arêtes fictives dont au moins une non boucle se rejoignent «au milieu» d’une face. Cette configuration n’est pas minimale car les arêtes fictives servent uniquement à préserver la face homéomorphe à un disque. Il est possible dans ce cas de décaler toutes les arêtes sauf une non boucle, puis de supprimer cette arête qui est devenue pendante. Nous obtenons alors une carte avec moins de cellules et représentant les mêmes informations topologiques. Il faut noter que s’il existe plusieurs arêtes fictives non boucle incidentes au sommet, les configurations obtenues sont isomorphes quel que soit le choix de l’arête a utilisée pour le décalage des autres arêtes.
Le deuxième cas est celui d’un sommet fictif pour lequel il n’existe pas d’arête non boucle incidente. Ce cas correspond à la configuration minimale d’un tore à k tunnels, comme le sommet v de l’exemple de la Fig. 4.4.3. Dans cette configuration, le sommet ne peut alors pas être supprimé sans entraîner la suppression de la face entière incidente au sommet et donc la perte de l’information topologique représentée par cette face frontière. Pour cette raison ce type de sommet est conservé dans la Def. 70.
En pratique, nous testons les propriétés des sommets avant d’effectuer le décalagage des arêtes fictives pour des raisons d’efficacité. Pour cela, nous parcourons chaque arête incidente au sommet courant, en comptant le nombre d’arêtes non fictives #anf, ainsi que le nombre d’arêtes réelles et arêtes fictives non boucles #arnb et #afnb (ces nombres peuvent être calculés par un algorithme linéaire en nombre de brins incidents au sommet, en marquant les arêtes rencontrées). Si #anf>0, le sommet est réel, sinon il est fictif. Dans les deux cas, nous pouvons facilement caractériser les deux conditions de la Def. 70 :
[a][b]

Figure 4.25: Le niveau 3 d’une image 3D. (a) La carte de niveau 2 de la Fig. 4.23. (b) La carte de niveau 3 dans laquelle tous les sommets de degré deux ont été supprimés.
Nous pouvons voir Fig. 4.25 la carte de niveau 3 de l’exemple utilisée Fig. 4.23. Cette carte est désormais composée de 2 sommets, 4 arêtes, 6 faces, et 4 volumes. Elle est minimale : il n’est pas possible de supprimer une cellule en conservant toutes les faces frontières de l’image, et chaque face homéomorphe à un disque. Nous pouvons prouver que le processus de décalage d’arête couplé à la suppression de sommet permet bien d’obtenir un minimum global quel que soit la position initiale des arêtes fictives. En effet, les sommets sont considérés sans tenir compte de la position des arêtes fictives. De ce fait, au moment de traiter un sommet s, soit il satisfait les conditions de la Def. 70 et il est supprimé, soit il ne pourra jamais les satisfaire, quel que soient les autres suppressions et décalages effectués ultérieurement.
La carte de niveau 3 est, de manière similaire à la carte de niveau 2 en 2D, la carte combinatoire minimale représentant la partition de l’image en régions. Mais comme en 2D, nous devons ajouter un arbre d’imbrication des régions pour positionner entre elles les éventuelles composantes connexes de la carte. Cet arbre repose sur le même principe qu’en dimension 2 : les régions appartenant à la même composante 18-connexe sont regroupées au sein d’un même ensemble, ce qui permet de retrouver directement un brin par surface bordant les cavités d’une région donnée (cf. les explications données en Section 4.3.3, les seules différences étant le remplacement de la 4-connexité 2D en 6-connexité 3D, et de la 8-connexité 2D en 18-connexité 3D).
[a][b]
[c]
Figure 4.26: Exemples de plongements géométriques associés à différentes cellules de la carte. (a) Une face sphérique représentée par un ensemble de surfels. Cette face n’a pas de bord, donc aucun lignel n’est allumé. (b) Une face représentée par un ensemble de surfels, et bordée par une arête (une boucle) représentée par un ensemble de lignels. L’arête n’a pas de bord, il n’y a pas de pointel allumé. (c) Une arête représentée par un ensemble de lignels, ayant ses deux sommets extrémités allumés.
Pour décrire la géométrie, nous utilisons la même solution qu’en 2D : une matrice d’éléments intervoxels dans laquelle sont allumés les éléments appartenant aux frontières des régions (cf. les exemples de la Fig. 4.26) :
Chaque brin de la carte est associé avec un triplet (pointel, lignel, surfel) qui permet de retrouver la géométrie de n’importe quelle cellule non fictive. Les cellules fictives (sommets et arêtes) n’ont pas de géométrie car leur rôle est purement topologique. De plus, il n’est pas toujours possible d’associer à une arête fictive une courbe simple de lignels (par exemple dans le cas d’un tore à quatre trous, la carte correspondante est composée de huit arêtes fictives. Il n’est alors pas possible d’associer une géométrie à ces huit arêtes qui se rejoignent uniquement à leur extrémités en un même pointel, étant donné qu’un pointel peut être au maximum incident à six lignels).
La géométrie d’un sommet est directement obtenue par le pointel. La géométrie d’une arête est l’ensemble des lignels obtenus par un parcours dans la matrice à partir du lignel orienté du triplet (l’orientation du lignel est donnée par le couple (pointel,lignel)), en avançant de lignel en lignel jusqu’à tomber sur un pointel allumé ou à revenir sur le lignel initial. La géométrie d’une face est l’ensemble des surfels obtenus par un parcours dans la matrice à partir du surfel orienté (l’orientation étant donnée par le triplet), en parcourant tous les surfels voisins du surfel courant, non séparés par un lignel (cf. exemple Fig. 4.26 et l’article [Dam08] pour plus de détails).
Il existe un cas particulier pour les pointels incidents à un seul lignel. Ce cas se produit lorsqu’un lignel est incident à quatre surfels mais incident uniquement à deux régions (cf. exemple Fig. 4.27). Dans ce cas, le lignel est allumé car il est incident à plus de deux surfels, et les pointels extrémités du lignel sont incidents uniquement à ce pointel. Ces pointels doivent être allumés dans la matrice, afin que les extrémités de chaque arête non boucle soient bien composées de deux pointels allumés. Ce cas n’est pas possible pour les lignels, car un lignel ne peut pas être incident à un seul surfel par définition des régions et des frontières.
Comme en 2D, nous appelons carte topologique le modèle composé de la carte combinatoire de niveau 3, de l’arbre d’imbrication des régions, et d’une représentation de la géométrie (cf. exemple Fig. 4.28). Comme en 2D, le choix du modèle utilisé pour représenter la géométrie dépendra des besoins des applications, et n’est pas crucial pour nous, les principales difficultés portent en effet sur la définition du modèle minimal préservant les informations topologiques.
Nous pouvons voir Fig. 4.29 les différents cas résolus par la conservation des arêtes fictives. En effet, contrairement à la déconnexion de volume qui se produit uniquement en présence d’imbrication, le problème de déconnexion de face se pose lorsqu’une surface possède plusieurs bords. De plus, un problème se pose également pour les surfaces sans bord. Dans ces cas, la solution à base d’arbre d’imbrication n’est pas adaptée pour trois raisons :
Figure 4.29: Le problème de représentation de faces selon leur nombre de bords (en noir et épais sur les figures). (a) Une face comportant 3 bords, sans relation d’imbrication entre eux. (b) Une face sans bord. (c) et (d) Deux surfaces avec les mêmes bords mais pas la même topologie.
La préservation des arêtes fictives résout tous ces problèmes. En effet, avec ce type d’arête, chaque face de la carte est homéomorphe à un disque et le genre de chaque surface peut toujours être calculé en comptant le nombre de cellules la composant et en utilisant la formule d’Euler-Poincaré. En effet, ce type d’arête permet :
[a][b]
[c]
[d]
Figure 4.30: Représentation avec des arêtes fictives des exemples de la Fig. 4.29. Les arêtes fictives sont dessinées en noir. La suppression de ces arêtes entraîne la disparition de l’objet ou une déconnexion de face.
Après avoir défini le modèle des cartes topologiques, nous nous sommes intéressés à la définition d’opérations sur ces modèles. La première opération que nous avons étudiée est l’opération d’extraction qui permet de construire une carte topologique à partir d’une image étiquetée. Cette phase est en effet l’étape préalable à toutes les autres opérations. Nous avons ensuite étudié les opérations de fusion et de division de régions, qui sont les opérations de base permettant de modifier la subdivision de l’image en régions. De plus, ces opérations nous permettent par la suite de définir des algorithmes de segmentation utilisant la carte topologique. Nous donnons ici simplement les principes généraux de ces opérations sans rentrer dans le détail. Le lecteur intéressé pourra trouver plus d’informations dans les différentes références indiquées lors de la présentation des opérations.
Nous avons proposé trois algorithmes permettant de construire la carte topologique, en 2D et 3D, à partir d’une image étiquetée. Un premier algorithme, dit naïf, consiste à construire la carte de niveau 0 puis à la simplifier progressivement selon les définitions des différents niveaux (cf. Fig. 4.31 pour une illustration en 2D). Cet algorithme a l’avantage d’être simple. Son inconvénient principal est de devoir créer la carte de niveau 0 qui peut contenir énormément de brins. De ce fait, cette carte peut ne pas tenir en mémoire et donc empêcher le calcul de la carte minimale, malgré le fait qu’elle contienne beaucoup moins de brins.
Figure 4.31: Le principe de construction naïf d’une carte topologique 2D. (a) Une image 2D étiquetée. (b) La carte de niveau 0 initiale. (c) La carte de niveau 1 obtenue après suppression de chaque arête séparant deux pixels de même étiquette. (d) La carte de niveau 2 obtenue après la suppression de chaque sommet supprimable et de degré deux.
Pour résoudre ce problème, nous avons proposé un second algorithme d’extraction, dit par balayage. Son principe consiste à balayer l’image (cf. la Fig. 4.32 pour une illustration en 2D). Pour chaque pixel/voxel, un carré/cube est créé, et ajouté à la carte en cours de construction. Pour cela, nous conservons un brin correspondant à l’élément précédent du parcours, qui permet de raccrocher le nouvel élément. Ensuite, la carte est localement simplifiée autour du nouvel élément, en supprimant les cellules caractérisées dans les définitions des niveaux de simplification. L’avantage de cet algorithme est de ne pas représenter toute la carte de niveau 0 en mémoire puisque les simplifications sont effectuées de manière progressive. De plus, afin de traiter simplement les éléments situés au bord de l’image, nous avons créé un bord initial qui est replié sur lui-même (cf. exemple Fig. 4.5.1). Ce bord revient à replier l’image 2D sur un cylindre, en identifiant les pixels à droite de l’image avec les pixels à gauche de l’image et sur la ligne suivante, ce qui ramène le parcours de l’image à toujours avancer le pixel courant.
Figure 4.32: Déroulement de quelques étapes de la construction par balayage de la carte topologique représentant une image 2D étiquetée. Les pixels hachurés appartiennent à la région infinie. Le trait pointillé représente la relation β1 permettant de «fermer» le bord. (a) La carte initiale représentant le bord supérieur et gauche (correspondante à l’image de la Fig. 4.5.1). (b) Création et couture du carré représentant le pixel (1,1). (c) Les cellules sont localement simplifiées autour du pixel (1,1) lorsqu’elles vérifient les conditions. (d) Création et couture du carré représentant le pixel (2,1). (e) Carte obtenue après le traitement du pixel (2,1). (f) Création du carré associé à un pixel (4,1) appartenant à la dernière colonne. (g) Carte obtenue après le traitement du pixel (4,1). Comme l’image est plaquée sur un cylindre, cette configuration est équivalente à la carte présentée en (h).
En 3D, nous effectuons deux repliements afin de replier l’image sur un tore volumique. De ce fait, le balayage de l’image se ramène également à uniquement faire avancer le voxel courant (cf. [Dam01] pour plus de détails. La version 2D est également décrite précisément dans [DBF04] et celle 3D dans [Dam08]). Cet algorithme a une complexité linéaire en nombre d’éléments de l’image. De plus, il nécessite un seul balayage, le calcul de l’arbre d’imbrication des régions étant réalisé dans une seconde étape, après l’extraction de la carte, avec un algorithme linéaire en le nombre de brins de la carte.
Enfin, nous avons défini un troisième algorithme d’extraction, dit optimal, utilisant la notion de précode. Un précode est une configuration locale de pixels/voxels dans une fenêtre de taille 2n (n étant la dimension de l’espace, donc 2 ou 3). Le principe de cet algorithme est d’associer à chaque précode possible un traitement modifiant localement la carte (cf. les deux exemples de la Fig. 4.33). L’algorithme d’extraction se ramène alors à balayer l’image (de manière similaire à l’algorithme par balayage) et à appliquer la modification associée au précode courant. Cet algorithme est alors optimal car pour chaque configuration, il effectue un nombre minimal d’opérations de mise à jour de la carte. En 2D, il existe 15 précodes différents. En découpant l’étude de ces précodes en fonction des niveaux de simplification, nous avons montré que des configurations pouvaient être factorisées en introduisant la notion de précode partiel, un précode dans lequel certain pixels/voxels peuvent avoir n’importe quelle valeur. Cette factorisation nous a amené à réduire le nombre de cas à 10, sans aucun surcoût de traitement. Le gain n’est pas très important en 2D mais il devient beaucoup plus intéressant en dimension 3 où le nombre total de précodes existant est de 4140, ce qui rend difficile le développement de toutes les fonctions associées. En factorisant ces précodes à l’aide de la notion de précode partiel, nous avons réduit le nombre de cas à 379, et l’avons encore diminué à 129 en regroupant les configurations symétriques. Ce nombre de cas reste important, mais le développement des différentes fonctions redevient envisageable, ce qui n’était pas le cas avec le nombre initial de cas. Une première version de cet algorithme à base de précodes a été présentée dans [BDF00]. La version 2D est décrite dans [DBF04], et la version 3D est décrite en détail dans [Dam01].
Précode Carte initiale Carte finale
Figure 4.33: Deux exemples de précodes, le premier étant un précode partiel. Pour chaque précode, il faut transformer la carte initiale en la carte finale. Cette transformation est équivalente à la création d’un carré représentant le pixel, puis à la suppression locale des cellules autour de ce pixel. Mais l’opération est ici optimale car nous évitons la création inutile de brins, et nous réutilisons lorsque c’est possible les brins existants.
Les premières opérations de modification que nous avons définies sont la fusion et la découpe de régions. Ce travail a été initié durant le stage de master recherche de Patrick Resch [DR02, DR03] avant d’être poursuivi et généralisé durant la thèse d’Alexandre Dupas [DD08a, DD09, Dup09]. Les opérations présentées ici le sont pour les cartes topologiques 3D, mais sont bien entendu définies pour les cartes topologiques 2D de manière équivalente.
De manière générale, l’opération de fusion va s’appuyer sur les opérations de suppression, et l’opération de découpe va s’appuyer sur les opérations d’insertion. La principale difficulté des opérations de modification dans le cadre des cartes topologiques est de garantir la préservation des propriétés de ce modèle, c’est-à-dire principalement la minimalité de la carte combinatoire, et conserver chaque face homéomorphe à un disque. Il faut également garantir le lien cohérent entre la carte combinatoire et l’arbre d’imbrication des régions, la propriété sur le brin représentant, et le lien entre la carte et le plongement géométrique. Pour simplifier les modifications, nous découpons souvent l’opération en deux étapes : la première étape effectue les modifications sans se préoccuper des contraintes, et la deuxième étape s’occupe uniquement des mises à jour liées à ces contraintes.
La première opération définie est la fusion de régions. Nous avons proposé deux approches pour cette opération (détaillées dans les Algorithmes 4.34 et 4.5.2) : la première, dite fusion locale, qui va fusionner un ensemble connexe de régions dans une seule région ; la seconde approche, dite fusion globale, qui va effectuer la fusion simultanée de plusieurs ensembles de régions connexes, chaque ensemble étant fusionné dans une région. Nous avons comparé ces approches et montré que la première est plus intéressante dans le cadre d’un faible nombre de régions à fusionner, comme par exemple dans une utilisation interactive où les régions sont sélectionnées par un utilisateur, et que la seconde est plus intéressante dans le cadre de la fusion d’un grand nombre de régions, comme par exemple dans le cas d’une segmentation d’images par agrégation de régions.
Figure 4.34: Algorithme : Approche locale de la fusion de régions
- Entrées : Une carte topologique C;
Un ensemble 6-connexe de régions E.- Résultat : Fusionne les régions de E dans C.
choisir la plus petite région de E comme région résultante;
Pour chaque brin b appartenant aux régions de E faire
Si region(β3(b)) ∈ E alors
marquer b et β3(b);mettre à jour l’arbre d’imbrication des régions;
supprimer toutes les faces intérieures (préalablement marquées);
simplifier les cellules incidentes aux faces supprimées;
L’Algorithme 4.34 donne le principe général de l’approche locale de la fusion. Il comporte trois étapes principales :
La première étape garantit que le brin représentant b de la région résultante de l’union vérifiera bien la contrainte des brins représentants (c-à-d par β3, nous obtenons un brin d’une région plus petite que la région de b). Ensuite, le marquage des faces intérieures se fait simplement en testant pour chaque brin b des régions de S si β3(b) est un brin d’une région de E. Si oui la face est intérieure aux régions de l’ensemble et elle devra être supprimée. La mise à jour de l’arbre d’imbrication va consister à supprimer les régions de E et à les remplacer par une seule région, mais également à détecter des éventuelles nouvelles imbrications créées par la fusion. Cette étape est réalisée avant la suppression des faces intérieures afin de pouvoir utiliser ces faces pour retrouver les futures relations d’imbrication. Ensuite, il reste à mettre à jour la carte combinatoire, tout d’abord en supprimant les faces intérieures (en utilisant les opérations de 2-suppression, tout en mettant également à jour la géométrie dans la matrice d’inter-éléments), puis en simplifiant la carte pour la rendre minimale (en utilisant les définitions des différents niveaux, et les opérations de 1- et 0-suppression).
L’approche globale de la fusion de régions consiste à fusionner simultanément plusieurs ensembles 6-connexes de régions. Son principe est de séparer les modifications de la carte topologique du processus de fusion de régions proprement dit. Dans un premier temps, les régions sont manipulées avec un haut niveau d’abstraction, à l’aide d’arbres union-find. Puis, dans un second temps, les fusions de haut niveau sont retranscrites dans la partition représentée par une carte topologique en supprimant les cellules inutiles et en construisant le nouvel arbre d’imbrication des régions.
L’Algorithme 4.5.2 présente le principe de la fusion de régions par approche globale. Il prend en paramètres une carte topologique C et une fonction Oracle qui indique si deux régions doivent être fusionnées. L’algorithme modifie la carte topologique de sorte que tous les ensembles 6-connexes de régions désignés par l’oracle soient effectivement fusionnés dans la partition finale. Il comporte trois étapes principales :
Figure 4.35: Algorithme : Approche globale de la fusion de régions
- Entrées : Une carte topologique C ;
Une fonction Oracle.- Résultat : Fusionne toutes les régions par composante 6-connexe en fonction de l’oracle.
Pour chaque brin b ∈ C faire
Si Oracle(region(b),region(β3(b))) alors
fusionner symboliquement region(b) et region(β3(b));
supprimer toutes les faces intérieures;
simplifier la carte topologique;
construire le nouvel arbre d’imbrication des régions;
Lors de la première étape de l’algorithme, chaque région est initialisée comme racine de son propre arbre union-find. La fusion symbolique de deux régions consiste alors simplement à faire l’union des deux arbres union-find correspondants. À la fin de cette étape, chaque arbre union-find est un ensemble 6-connexe de régions à fusionner. Un brin b appartient à une face intérieure si region(b)=region(β3(b)). Les étapes suivantes de l’algorithme sont identiques à celles de la fusion locale : supprimer les faces intérieures, simplifier la carte et mettre à jour l’arbre d’imbrication. La différence avec la fusion locale est que ces modifications sont faites sur toute la carte, et non plus de manière locale. De ce fait, nous préférons reconstruire totalement l’arbre d’imbrication plutôt que de le mettre à jour : en effet, comme le nombre de modifications dans cet arbre peut être important, il est moins coûteux de le recalculer entièrement.
L’opération inverse de la fusion de régions est la division d’une région. L’objectif est d’obtenir plusieurs régions en découpant une région initiale. De manière générale, la division de région utilise un guide, par exemple une surface, pour découper la région initiale. Le nombre de régions résultantes dépend alors de la géométrie de la région initiale et de la géométrie du guide utilisé pour la découpe. Une division particulière est l’éclatement d’une région. Il s’agit de la division d’une région de manière à ce que chaque région résultante ne contienne qu’un seul voxel.
L’Algorithme 4.5.2 présente les différentes opérations réalisées pour éclater une région en régions élémentaires. Il prend comme paramètres une carte topologique et une région à éclater.
Figure 4.36: Algorithme : Éclatement d’une région en régions élémentaires
- Entrées : Une carte topologique C;
Une région R.- Résultat : Éclatement dans C de la région R en régions élémentaires.
D ← ensemble de brins vide;
Pour chaque surface S du bord de R faire
ajouter l’un des brins de S à D;
éclater le volume incident aux brins de D en volumes élémentaires;
construire une nouvelle région par volume;
mettre à jour l’arbre d’imbrication;
simplifier les bords des régions éclatées;
Son principe consiste à éclater chaque surface bordant la région R en ce que nous appelons des volumes élémentaires. Un volume élémentaire est un volume qui correspond à un voxel de l’image (de même pour une face/arête élémentaire pour les surfels/lignels). Cette étape se réalise en insérant des sommets sur les bords des faces jusqu’à avoir des arêtes élémentaires. Puis nous saturons chaque face en insérant toutes les arêtes possibles jusqu’à obtenir uniquement des faces élémentaires, et enfin nous saturons le volume en insérant toutes les faces possibles jusqu’à obtenir uniquement des volumes élémentaires (cf. exemple Fig. 4.37). Nous associons ensuite une nouvelle région à chaque volume élémentaire et mettons à jour l’arbre d’imbrication des régions en remplaçant la région éclatée par ces nouvelles régions, et en modifiant éventuellement les relations d’imbrication qui existaient avec R. Enfin, nous devons simplifier le bord des nouvelles régions car il se peut que celles touchant le bord de R aient des cellules non minimales.
[a][b]
[c]
[d]

Figure 4.37: Exemple d’éclatement d’une région en volumes élémentaires. (a) La région initiale composée de trois faces : deux représentées par une seule arête qui est une boucle, et une troisième qui est composée de trois arêtes, dont une fictive. (b) Résultat après l’éclatement des arêtes non fictives en arêtes élémentaires. (c) Résultat après la saturation des faces : chaque face de la région est maintenant élémentaire. (d) Carte finale obtenue après la saturation de la région en volumes élémentaires.
L’éclatement d’une région construit une partition généralement sursegmentée de la région initiale. Une partition aussi détaillée n’est pas souhaitable dans la plupart des applications. D’une part le temps de calcul de cette opération est long, et d’autre part l’espace mémoire nécessaire pour représenter la partition éclatée est très important, surtout lorsque la région éclatée est grande. Nous avons donc défini une opération de division d’une région qui est plus adaptée aux besoins pratiques : la division de régions par un guide. Le guide est donné par un ensemble de surfels qui doit être séparant, c’est-à-dire couper la région R en au moins deux régions.
L’Algorithme 4.5.2 présente l’opération de division d’une région par un guide. Il prend en paramètres une carte topologique, une région et un ensemble de surfels qui est un guide de division pour la région sélectionnée.
Figure 4.38: Algorithme : Division d’une région par un guide
- Entrées : Une carte topologique C ;
Une région R ;
Un guide G.- Résultat : Division dans C de la région R par le guide G.
éclater les arêtes et les faces du bord de la région R;
construire le guide de division défini par G;
coudre le guide aux bords de la région R;
construire l’arbre d’imbrication des nouvelles régions;
simplifier la carte topologique;
La première étape de l’algorithme consiste à éclater le bord de la région à diviser en faces élémentaires, de manière similaire à l’étape d’éclatement d’une région, mais sans effectuer la dernière étape qui éclate les volumes. L’étape suivante construit le guide de division dans la carte topologique, en construisant une face carrée par surfel du guide, et en cousant correctement ces faces entre elles selon les configurations des surfels dans G. Ce guide est ensuite fusionné dans la carte topologique. Comme nous avons éclaté le bord de la région R, et par construction du guide, nous n’avons que des arêtes élémentaires. La fusion consiste alors simplement à interclasser les faces autour des arêtes du bord du guide. Le résultat de cette opération est le remplacement du volume associé à la région R par l’ensemble des volumes décrits par le guide et les bords de la région (cf. exemple Fig. 4.39). Il faut alors effectuer la mise à jour de l’arbre d’imbrication, puis simplifier la carte pour la rendre minimale.
[a][b]
[c]

Figure 4.39: Exemple de découpe d’une région par un guide. (a) La région initiale après que son bord ait été éclaté en faces élémentaires. (b) Le guide utilisé pour découper cette région. (c) Résultat obtenu après l’insertion du guide dans la région qui est découpée en trois volumes. Il reste à simplifier les bords de ces volumes et à mettre à jour l’arbre d’imbrication.
Dans ce chapitre, nous avons défini la carte topologique 2D et 3D, un modèle de représentation d’une image étiquetée. Ce modèle utilise une carte combinatoire minimale afin de représenter la partition de l’image en cellules ainsi que les relations d’incidence et d’adjacence entre ces cellules. Cette carte est liée à un modèle décrivant la géométrie de ses cellules, qui peut être une matrice d’inter-éléments, mais qui peut aisément être changé selon les besoins des applications. Enfin, un arbre d’imbrication des régions permet de compléter la représentation du modèle en décrivant les relations entre les différentes composantes connexes de la carte.
La carte topologique est définie de manière progressive, en utilisant les opérations de base définies au chapitre 3. Cette définition progressive simplifie les définitions ainsi que l’étude des problèmes de déconnexion, car chaque niveau est défini par l’application d’un seul type d’opération. C’est ce type de définition qui nous a permis d’étendre de manière assez directe la carte topologique 2D en dimension supérieure, chose qui semblait beaucoup plus délicate avec les modèles proposés précédemment dans la littérature, soit de par leur définition directe, soit à cause de leur algorithme de construction. Cette définition progressive a également simplifié la définition d’algorithmes d’extraction à partir d’une image, en facilitant l’intégration progressive des opérations de simplification, et en proposant un moyen direct de regrouper les cas à traiter.
Nous avons également présenté brièvement quelques opérations définies dans le cadre des cartes topologiques : tout d’abord l’extraction d’une carte topologique à partir d’une image étiquetée, puis les opérations de fusion et de découpe qui sont les opérations de modification de base d’une carte topologique.
Nous avons dans ce chapitre utilisé les cartes combinatoires, mais comme l’ensemble des définitions utilisent les opérations de base, ces définitions sont également valides sans aucune modification pour les cartes généralisées. Le choix des cartes combinatoires a été ici guidé par le développement d’un logiciel (présenté chapitre 7) qui demande deux fois moins d’espace mémoire pour les cartes combinatoires que pour les cartes généralisées.
Nous souhaitons poursuivre ces travaux afin d’étendre la carte topologique en dimension quelconque. Les niveaux de simplification s’étendent de manière directe : en dimension n, une carte topologique serait définie par n niveaux de simplification, chaque niveau i, 1≤ i ≤ n étant la simplification du niveau i−1 en utilisant la (n−i)-suppression. Un arbre d’imbrication serait utilisé pour conserver les relations entre les différentes composantes connexes de la carte. Le seul problème qui reste partiellement ouvert est celui des éléments fictifs. Pour tout i, 1≤ i < n−1, nous aurions des i-cellules fictives pour conserver chaque (i+1)-cellule homéomorphe à une boule. La conservation de ces cellules doit pouvoir se faire en détectant les cellules de degré un, mais cela doit être étudié plus précisément. Par contre, pour obtenir la carte minimale, nous devons décaler ces cellules afin qu’elles n’empêchent pas d’autres suppressions. C’est ce point qui reste à étudier plus précisément : le décalage de i-cellule, et son utilisation pour garantir la préservation de la topologie des objets, tout en garantissant également l’obtention de la carte minimale. Nous allons également poursuivre le développement d’autres opérations, pour proposer un ensemble d’outils permettant de réaliser la plupart des opérations possibles de traitement d’images.
Nous allons maintenant présenter une extension hiérarchique des cartes que sont les pyramides généralisées. L’objectif de ce modèle est de manipuler différentes représentations d’un même objet, par exemple afin de conserver plusieurs niveaux de détails, ou pour décrire différentes subdivisions d’un même objet, chacune pouvant correspondre à une sémantique particulière. Ces pyramides sont à nouveau définies à partir des opérations de base présentées au chapitre précédent.
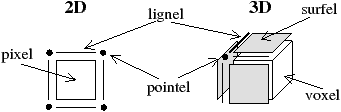


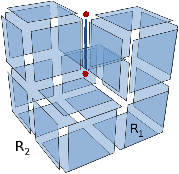
 [b
[b [c
[c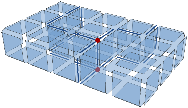 [d
[d
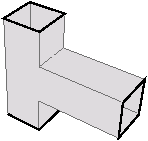 [b
[b [c
[c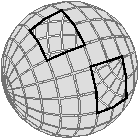 [d
[d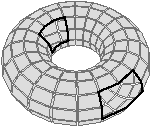
 [b
[b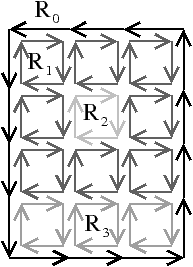 [c
[c [d
[d
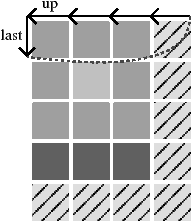 [b
[b [c
[c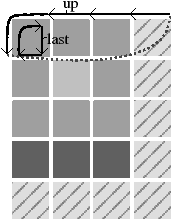 [d
[d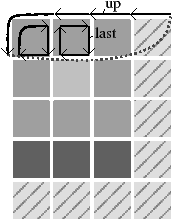
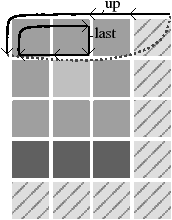 …[f
…[f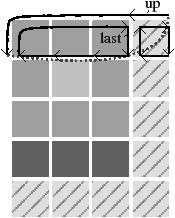 [g
[g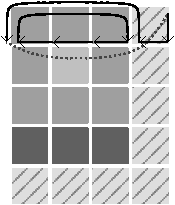 [h
[h





