
 Home pageResearchesPublicationsTeachingSupervised ThesisCVContactsLinks
Home pageResearchesPublicationsTeachingSupervised ThesisCVContactsLinksPolynomial Algorithms for Open Plane Graph and Subgraph Isomorphisms
Theoretical Computer Science (TCS)
Volume 498, pages 76-99, August 2013
Volume 498, pages 76-99, August 2013
Links: 


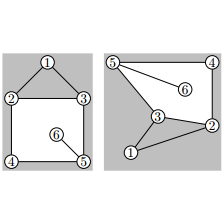
Abstract: Graphs are used as models in a variety of situations. In some cases, e.g. to model images or maps, the graphs will be drawn in the plane, and this feature can be used to obtain new algorithmic results. In this work, we introduce a special class of graphs, called open plane graphs, which can be used to represent images or maps for robots: they are planar graphs embedded in the plane, in which certain faces can be removed, are absent or unreachable. We give a normal form for such graphs and prove that one can check in polynomial time if two normalised graphs are isomorphic, or if two open plane graphs are equivalent (their normal forms are isomorphic). Then we consider a new kind of subgraphs, built from subsets of faces and called patterns. We show that searching for a pattern in an open plane graph is tractable if and only if the faces are contiguous, that is, we prove that the problem is NP-complete otherwise.
Keywords: Open plane graphs; Equivalence and isomorphism; Subgraphs and patterns; Polynomial and NP-complete problems
Keywords: Open plane graphs; Equivalence and isomorphism; Subgraphs and patterns; Polynomial and NP-complete problems
BibTex references
@Article{HigueraAl13,
author = {{de la Higuera}, C. and Janodet, J.-C. and Samuel, E. and Damiand, G. and Solnon, C.},
title = {Polynomial Algorithms for Open Plane Graph and Subgraph Isomorphisms},
journal = {Theoretical Computer Science (TCS)},
publisher = {Elsevier},
volume = {498},
pages = {76-99},
month = {August},
year = {2013},
keywords = {Open plane graphs; Equivalence and isomorphism; Subgraphs and patterns; Polynomial and NP-complete problems},
url = {https://dx.doi.org/10.1016/j.tcs.2013.05.026}
}
author = {{de la Higuera}, C. and Janodet, J.-C. and Samuel, E. and Damiand, G. and Solnon, C.},
title = {Polynomial Algorithms for Open Plane Graph and Subgraph Isomorphisms},
journal = {Theoretical Computer Science (TCS)},
publisher = {Elsevier},
volume = {498},
pages = {76-99},
month = {August},
year = {2013},
keywords = {Open plane graphs; Equivalence and isomorphism; Subgraphs and patterns; Polynomial and NP-complete problems},
url = {https://dx.doi.org/10.1016/j.tcs.2013.05.026}
}
Image
 [Back]
[Back]